






鳥類識別系統集成了優秀的深度學習鳥類識別模型、多傳感器融合技術和智能云臺控制,能夠實現鳥類的自動物種識別、數量統計、距離測量與方位確定,并將信息實時疊加于視頻流中。該系統極大地提升了鳥類學研究、生物多樣性調查與野生動物保護的效率和精度,為相關領域的科研與實踐工作提供了強大的技術工具。![]()
一、 引言:傳統鳥類監測的挑戰與技術革新
傳統的鳥類野外調查主要依賴研究人員通過望遠鏡目視觀察或通過固定點位攝像機錄制視頻后人工回放分析。這種方法存在明顯局限性:
人力依賴性強,效率低下:耗時耗力,且受限于調查者的經驗和體力。
存在主觀誤差:物種識別和數量統計易受人員主觀判斷影響。
時空覆蓋有限:難以實現全天候、大范圍、不間斷的持續監測
數據維度單一:通常僅能記錄物種和數量,難以精確獲取位置、距離等空間信息。
水境人工智能鳥類識別高清云臺攝像機的出現,正是為了應對這些挑戰。它通過將前沿的人工智能技術與精密的光機電技術相結合,實現了鳥類監測的自動化、智能化、數字化和量化,標志著鳥類監測技術進入了一個全新的時代。
二、 系統核心工作原理
該攝像機系統是一個復雜的集成系統,其工作原理可分解為四個核心模塊協同工作。
1. 高清圖像采集與預處理模塊
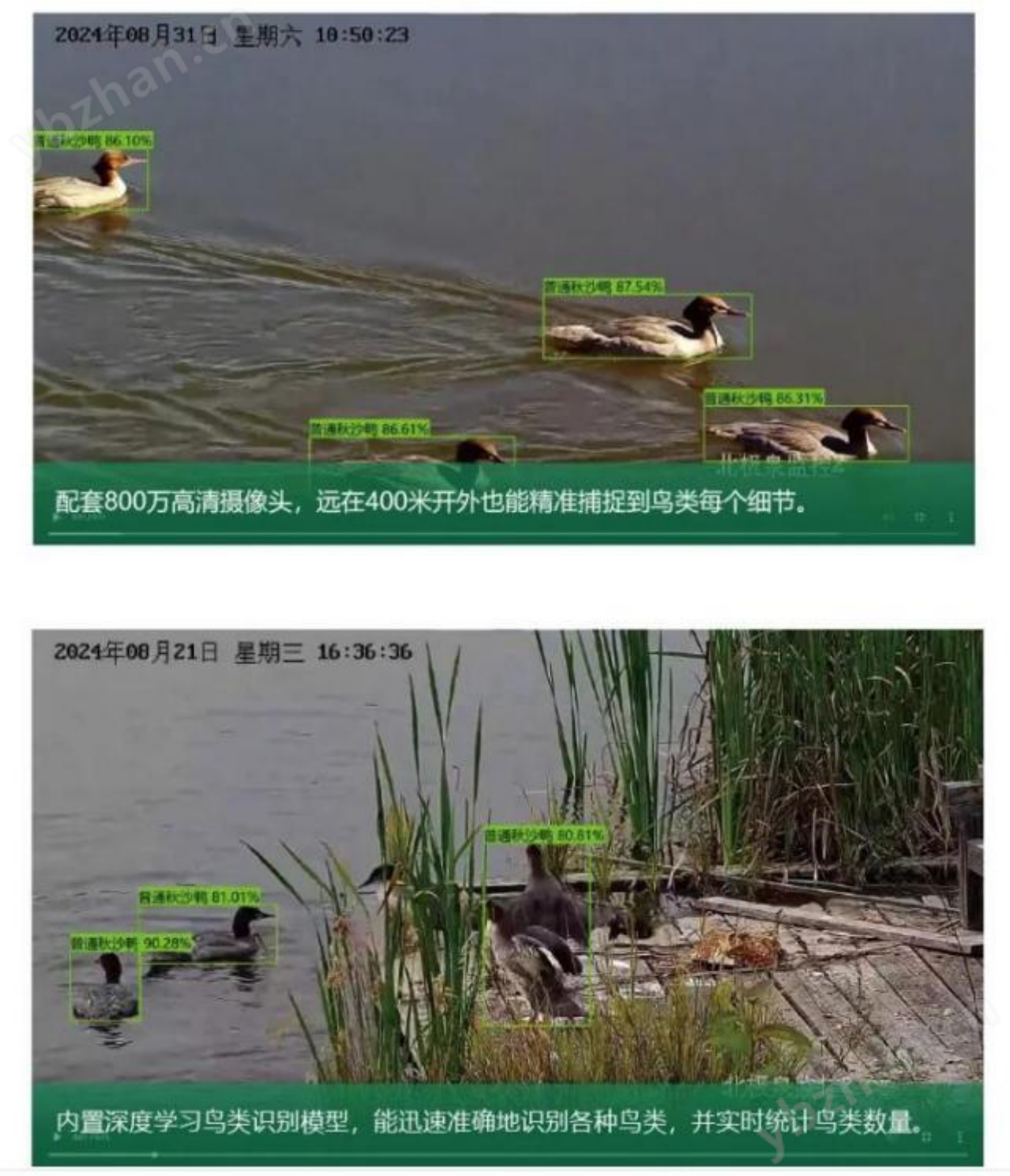
高性能光學鏡頭:采用超高清(如4K 及以上)光學變焦鏡頭,能夠捕捉遠處鳥類的清晰細節,為準確的識別提供高質量的原始圖像數據。
圖像信號處理(ISP):內置 ISP 芯片對原始圖像數據進行降噪、銳化、寬動態范圍(WDR)調節、色彩還原等優化處理,確保在不同光照條件(如逆光、陰影)下都能輸出畫質優良的視頻流。
2. 人工智能鳥類識別與分析引擎(核心)
這是整個系統的“大腦”,其技術核心是一個經過深度學習的卷積神經網絡(CNN)模型。
模型訓練:該模型在訓練階段使用了數百萬張包含各種鳥類、不同姿態、不同背景、不同光照條件下的標注圖像進行學習。通過多層神經網絡的特征提取,它學會了區分不同鳥類物種的細微特征,如喙的形狀、羽毛的顏色與紋路、體型、飛行姿態等。
實時推理:在部署后,系統對實時視頻流中的每一幀進行推理。
目標檢測:首先使用目標檢測算法(如 YOLO, SSD 等)定位視頻畫面中所有可能是鳥類的物體,并生成邊界框(Bounding Box)。
圖像分類:然后將邊界框內的圖像區域裁剪出來,輸入到鳥類分類模型中,計算出該目標屬于各個物種的概率,最終給出最可能的物種標簽及其置信度。
多 目標追蹤(MOT):為了準確統計數量并避免重復計數,系統會使用多目標追蹤算法(如 SORT, DeepSORT)為每一只進入畫面的鳥分配一個 ID,跟蹤其運動軌跡,直至其離開畫面。
3. 多傳感器融合與空間信息測量模塊
單純識別物種遠遠不夠,系統還集成了多種傳感器來獲取豐富的空間信息。
激光測距:攝像機內置激光測距儀,可向識別出的目標鳥類發射不可見激光,通過計算激光返回的時間差,精確測量目標與攝像機之間的直線距離。
云臺方位傳感器:云臺內部裝有高精度的角度傳感器(如編碼器),能夠實時反饋云臺的水平方位角(Pan)和垂直俯仰角(Tilt)。
空間坐標計算:結合已知的攝像機經緯度坐標(通過內置 GPS 模塊或手動設置)、激光測距值、云臺方位角與俯仰角,系統可以通過三角幾何學原理,計算出鳥類目標所在位置的地理坐標(經緯度、海拔)。這為繪制物種分布圖和研究鳥類活動范圍提供了至關重要的數據。
4. 智能云臺與控制模塊
靈活機動:云臺支持水平360 °連續旋轉和垂直大角度俯仰,實現了真正意義上的全域監控。
自動追蹤:在識別到目標后,系統可指令云臺自動旋轉,使目標始終保持在畫面中間,實現持續的跟蹤拍攝,獲取更豐富的個體行為數據。
預設位與巡航:用戶可預先設置多個重點觀測位點(如多個鳥巢的位置),云臺可按設定路線自動巡航,實現對多個點位的周期性監測。
5. 數據疊加與輸出模塊
所有分析結果(物種名稱、數量、距離、方位角、地理坐標、時間戳等)會通過 OSD(On-Screen Display)技術實時疊加在視頻畫面上,形成帶有科學數據的視頻流。這些視頻和數據可通過有線網絡或4G/5G無線網絡實時傳輸至遠端的數據中心或云平臺,供研究者實時觀看或后續回溯分析。
6.設備參數
| 攝像機 | |
| 傳感器類型 | 1/1.8英寸 高性能 CMOS |
| 像素 | 800W |
| 分辨率 | 3264x2448 |
| 焦距 | 6.5mm~388mm |
| 圖像變倍 | 40倍光學變倍16倍數字變倍 |
| 低照度 | 彩色:0.001lux@F3.6黑白:0.0001lux@F3.60Lux(紅外燈/激光開啟) |
| 聚焦模式 | 自動/半自動/手動 |
| 紅外補光 | 紅外輔光燈150米 |
| 云臺 | |
| 旋轉范圍 | 水平范圍0°~360°垂直范圍:-90°~+90° |
| 鍵控速度 | 水平速度:0.1°~100°/s速度可設置 直范圍:0.1°~60°/s速度可設置 |
| 自動巡航 | 8條,每條可添加32個預置點 |
| 網絡 | |
| 網絡協議 | IPV4;TCP/IP;UDP;HTTP;DHCP;RTP/RTCP/RTSP;FTP;NTP;IGMP;ICMP |
| 視頻壓縮標準 | H.264;H.265;MJPEG;MPEG4 |
| 接口 | |
| 通訊接口 | 1個RJ45;10M/100M自適應以太網口;1個RS-485接口 |
| 報警輸出 | SDK報警輸出 |
| 其他 | |
| 工作溫度和濕度 | -40℃~65℃,濕度小于90% |
| 防護等級 | IP66 |
| 電池供應 | DC12 |
| 功耗 | ≤30W |
| 尺寸 | 420mm(L)x210mm(W)x240mm(H) |
| 重置 | ≤9kg |